Voici venu le moment de passer à l’étape de numérisation à proprement parler.
3 onglets du logiciel vont être concernés – ou plutôt directement liés.
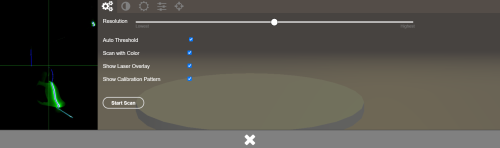
Sur la première page, on retrouve les éléments principaux du scan, à savoir :
- le choix de la résolution : plus elle sera élevée, mieux sera le résultat, mais plus long sera le temps de traitement. Il faudra donc trouver le bon compromis en fonction de la complexité de la pièce numérisée,
- le choix d’avoir une détection automatique ou manuelle du seuil de déclenchement (détection de la ligne laser),
- le choix de capturer ou non la texture. L’activation de cette option rallonge le temps de numérisation et reste inutile si la numérisation doit ensuite servir à une impression 3D,
Les autres options (affichage de la trace laser et de la grille) sont sans grande importance.
Avant de lancer un scan, il faudra donc s’assurer que la « visibilité » de la trace laser est optimale. On va pouvoir agir sur les paramètres de sensibilité de la caméra, dans l’onglet suivant.
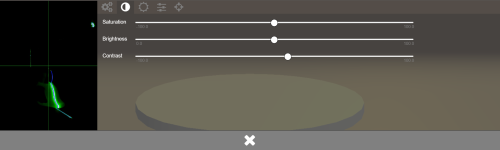
On va pouvoir agir sur la saturation, la luminosité et le contraste de l’image.
L’objectif est ici d’obtenir la trace la plus nette possible, tout en minimisant les détections parasites (ne faisant pas partie de l’objet). Il n’y a pas de recette miracle. Chaque pièce, chaque matière aura un comportement différent.
Prenons en exemple ce petit pingouin (rouge ?), actuellement éclairé simplement par l’anneau de lumière.
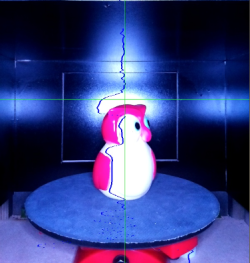
La trace bleue visible représente ce que le logiciel va considérer comme « forme » de l’objet. On voit ici que la partie blanche est ignorée.
En modifiant le niveau d’éclairage, ou la sensibilité de la caméra, on va obtenir une trace représentant plus fidèlement la forme de l’objet.

Il suffit ensuite de lancer la numérisation en cliquant sur le bouton Start Scan.
Le scan doit démarrer, avec un affichage presque temps réel de la trace obtenue.
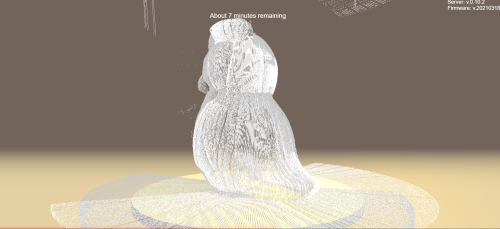
Un message informe de la fin du scan. Il est alors possible de tourner autour du résultat.
Le scan obtenu va maintenant devoir être exporté pour son utilisation. En bas à droite de l’écran, vous voyez maintenant apparaitre un menu option, qui va vous permettre de réaliser les opération d’export ou de suppression du fichier de scan.

Avec une configuration 2 lasers, le logiciel va vous proposer l’export de 3 fichiers : un pour chaque laser et un troisième (both) regroupant les nuages de points capturés par les 2 lasers.
Dans un premier temps, je vous conseille de récupérer les 3 fichiers proposés.
Les fichiers sont au format .ply, et vont devoir être manipuler pour pouvoir les transformer en un fichier exploitable par une imprimante 3D par exemple.
La solution la plus efficace pour traiter le fichier . ply sera d’utiliser un logiciel tel que MeshLab, logiciel open source.
Démonstration dans ce tuto :
Utilisaton de MeshLab