Si vous avez bien suivi les étapes précédentes, vous devez maintenant pouvoir accéder au logiciel lui-même. Cet accès se fait depis un navigateur Internet, le Raspberry émulant maintenant un serveur Web.
L’accès se fait sous la forme : http://<adresse ip du serveur>:8080.
Au lancement, si tout se passe bien, vous devez arriver sur l’écran ci-dessous.

Si cela n’est pas le cas, il suffira de suivre les consignes affichées pour identifier le problème.
En haut à droite, sont affichées les informations de version du Serveur et du firmware contenu dans la carte Arduino. Si vous avez laissé le paramètre de flashage automatique activé, vous n’avez pas besoin de vérifier si une version plus récente exise.
En cliquant sur l’icone en forme de canard, vous allez arriver sur l’écran principal.
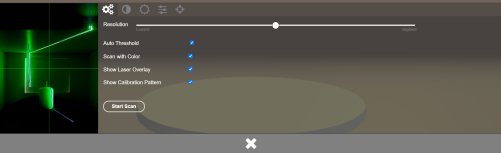
L’écran est composé de plusieurs zone :
- A gauche : le visuel vu par la caméra,
- Au centre : la représentation du plateau, sur laquelle viendra se superposer la capture,
- Et un bandeau contenant 5 icônes, qui vont permettre l’utilisation du scanner 3D.
Je vais présenter les fonctionnalités dans l’ordre logique d’une première utilisation du logiciel.
Accès aux fonctions du scanner
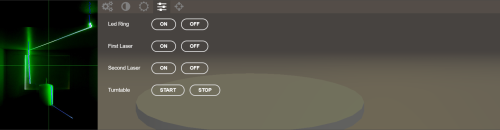
Cet onglet va nous permettre de vérifier le bon fonctionnement du scanner.
On doit pouvoir ici commander l’éclairage, les 2 laser et la rotation du moteur.
Pour valider la configuration, il faut :
- que chacune des commandes réagisse,
- que le plateau tourne dans le sens horaire,
- que l’image soit « dans le bon sens », y compris que le sens de rotation visualisé corresponde au sens physique de rotation du plateau.
Si l’un de ces éléments n’est pas conforme, il faudra revoir les réglages dans le fichier de paramétrage.
A partir de cet écran, on va pouvoir effectuer les premiers réglages, nécessaires avant toute tentative d’étalonnage ou de scan.
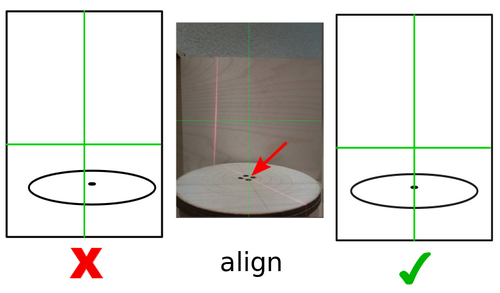
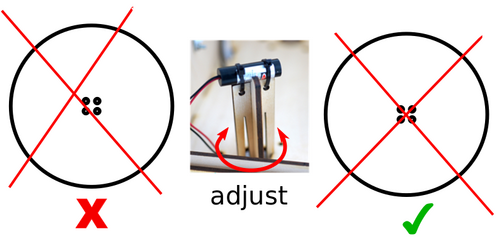
Premier point : La caméra doit être alignée au centre du plateau tournant.
Vous pouvez utiliser la superposition de croix verte dans l’image comme référence pour le centre de l’image.
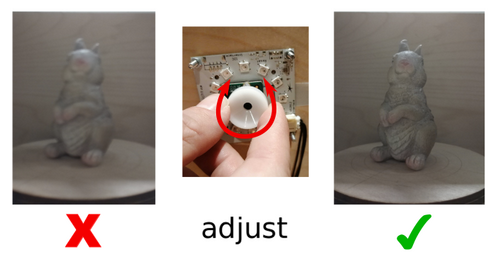
Deuxième point : Réglage du focus de la caméra
La plupart du temps, la caméra Raspberry Pi n’est pas mise au point par défaut (surtout V2). Il existe plusieurs façons de résoudre ce problème. L’option la plus simple est d’utiliser le morceau de plastique blanc qui est livré avec presque toutes les caméras Raspberry Pi depuis quelques années. Vous pouvez le coller sur le dessus de la caméra et régler la mise au point en le tournant. Il a un trou au milieu pour que vous puissiez voir les changements en temps réel si vous exécutez un flux en direct.
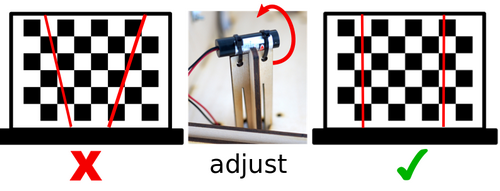
Troisième point : L’alignement vertical des lasers
Les lasers doivent toucher la grille d’étalonnage dans le sens vertical, aussi près de 90 degrés que possible. Vous pouvez faire pivoter le module laser pour ajuster l’alignement laser vertical.
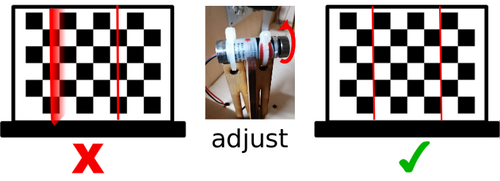
Quatrième point : L’alignement horizontal des lasers
Les lasers doivent traverser le centre du plateau tournant. Selon la manière dont vos lasers sont montés, cela peut être plus ou moins simple. Personnellement, j’ai redessiné les supports d’origine afin d’avoir un réglage horizontal.
Et enfin Cinquième point: Régler le focus des lasers
Lorsque le laser en dispose, tournez la bague de mise au point sur le laser jusqu’à ce que vous obteniez une ligne la plus nette possible. Si vous utilisez deux lasers, faites-le pour les deux. Généralement, cette opération modifie la verticalité du laser. Il faudra donc repasser par le troisième point…
Une fois que ces 5 points sont correctement réalisés, il va falloir passer par l’étape de calibration.
Calibration
Tant que cette étape n’est pas réalisée correctement, il sera impossible de lancer un scan !

Il suffit de placer la grille d’étalonnage, telle que définie dans le fichier de paramétrage et de cliquer sur le bouton Start Calibration .
La calibration peut prendre plusieurs minutes. Pendant la calibration, une information sur le temps restant est affichée.
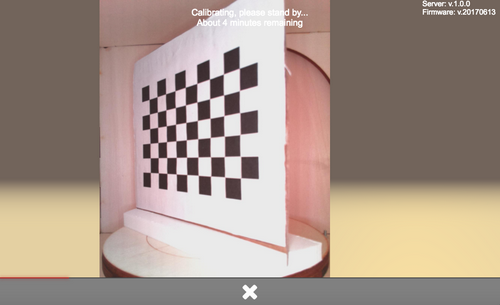
Quand la calibration est terminée, une notification indiquant que la calibration s’est bien terminée sera affichée pendant quelques secondes dans le coin supérieur gauche.
On va maintenant pouvoir passer à l’étape de numérisation.
La numérisation