Maintenant que le firmware est en place, il faut passer par une étape de configuration, afin d’adapter le logiciel à votre matériel. Tout le paramétrage est regroupé dans un fichier unique qui se trouve sur la carte Micro SD à l’emplacement suivant /etc/fabscanpi.
A partir du moment où vous avez bien déclaré le mode SSH sur le Raspberry, vous pouvez accéder à ce répertoire et éditer le fichier de configuration en vous connectant à votre carte avec n’importe quel client SSH.
Je vous propose d’utiliser PUTTY, cliet SSH open source relativement simple d’emploi, téléchargeable ici : http://www.putty.org
Putty ne nécessite pas d’installation. Il suffit de déposer l’exécutable dans un répertoire de votre disque. Pour établir une connexion, il vous suffira de connaître l’adresse IP attribuée par votre Box pour accéder au scanner. Ce sera cette même adresse aue vous utiliserez par la suite pour accéder à l’applicatif.
Au lancement de Putty, vous devez arriver sur un écran de ce type.
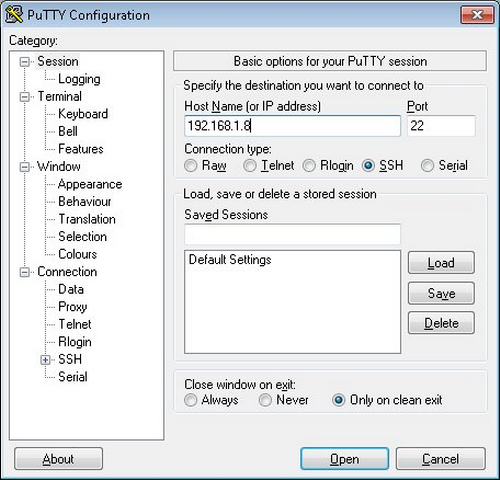
Entrez l’adresse IP de connexion et cliquez sur “OPEN”.
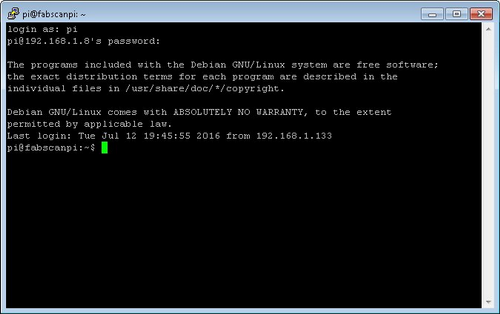
La console est maintenant ouverte et vous devez vous identifier en entrant login et mot de passe. Par défaut, le login est “pi” et le mot de passe est “raspberry” (ce sont ici les informations indiquées lors de la création de l’image).
Nous allons maintenant devoir éditer le fichier de configuration. Nous sommes maintenant dans un monde Linux, avec l’utilisation de ses commandes et de ses éditeurs. Par défaut, la distribution embarques des éditeurs tels que VI ou Nano. Je ne vais pas décrire ici leur utilisation. Si vous avez besoin de plus d’informations, Google sera votre ami.
Le fichier a éditer est le fichier default.config.json qui se trouve sous /etc/fabscanpi/.
Ce fichier contient un certain nombre de rubriques. Je vais détailler ci-dessous uniquement celles qu’il faudra potentiellement adapter, les autres ne devant pas être modifiées.
Laser
« laser »:{
« numbers »: 2,
« color »: « G (RGB) »,
« interleaved »: False,
}
Cette section décrit le paramétrage du/des laser(s). « numbers » défini combien de lasers vous allez utiliser (recommendation de 1 ou 2). «color » défini la couleur des lasers (R pour rouge, G pour vert, B pour bleu). «interleaved » sera positionné à True pour les scanners sans boitier (ciclop, cowtech, atlas etc.). Gardez à l’esprit que le traitement entrelacé augmentera le temps de scrutation.
Plateau tournant
« process_numbers »: 4,
« turntable »: {
« steps »: 3200,
« radius »: 100,
« height »: 190
}
Dans cette section, vous pouvez modifier les paramètres du plateau tournant.
– radius représente le rayon du plateau,
– steps représente le nombre de pas pour effectuer un tour complet,
– height représente la hauteur max de scan au dessus du plateau.
Camera
« camera »: {
« resolution »: {
« width »: 1640,
« height »: 1232
},
« preview_resolution »: {
« width »: 240,
« height »: 320
},
« rotate »: « True »,
« hflip »: « True »,
« vflip »: « False »,
« type »: « PICAM »
}
La résolution de l’aperçu est la valeur de résolution de la fenêtre des paramètres. La résolution est la résolution du module python picamera. Vous pouvez consulter la documentation de picamera. Si vous réglez ceci sur d’autres valeurs, assurez-vous de ce que vous faites, toutes les résolutions ne sont pas prises en charge par le picam. Certains peuvent entraîner une capture d’image plus lente.
A partir du moment où vous utilisez bien une caméra PI V2, je vous conseille de garder les paramètres proposés par défaut.
rotata peut être utilisé pour faire pivoter l’image de 90 degrés. Les valeurs hflip et vflip peuvent être utilisées pour le retournement horizontal et vertical de l’image. Le type de caméra par défaut est PICAM.
Connector
« connector »: {
« type »: « serial »,
« firmware »: « ciclop »,
« baudrate »: 14400,
« autoflash »: « True »,
« flash_baudrate »: 115200,
« port »: « /dev/ttyAMC0 »
},
Cette section est importante car elle permet de définir les paramètres de communication entre le Raspberry et la carte Arduino.
L’option autoflash est à True par défaut, ce qui signifie que le firmware est flashé automatiquement à chaque lancement. Le paramètre flash_baudrate défini la vitesse de flashage.
firmwrare est à positionner à ciclop dans mon cas.
baudrate sera limité à 14400 bauds, seule valeur acceptée dans le cas du ciclop.
La valeur de port va dépendre de la connexion entre les 2 cartes. Cette valeur va différer d’une carte à l’autre. La façon la plus simple pour la déterminer consiste à exécuter la commande suivante 2 fois, une première fois sans connecter la carte Arduinon, et la seconde carte connectée. Le port ajouté sera le bon :
list /dev/tty
Calibration
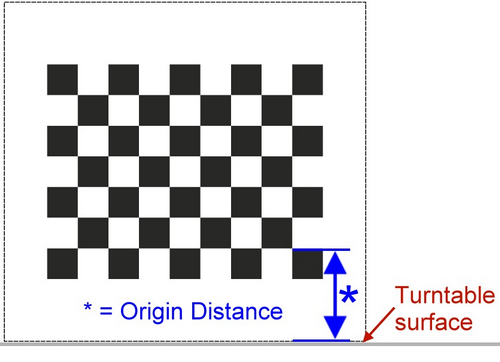
Pour la phase de calibration, on va pouvoir réutiliser la grille et le support initial fourni avec le ciclop. Il va être nécessaire de spécifier les caractéristiques de cette grille dans les paramètres.
« scanner_type »: « laserscanner »,
« calibration »: {
« weight_matrix »: [],
« dist_camera_matrix »: [],
« pattern »: {
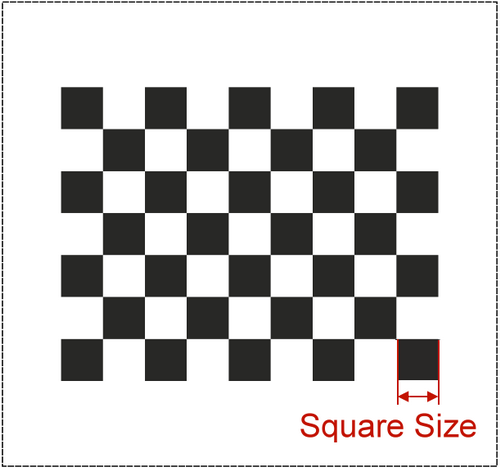
« square_size »: 11,
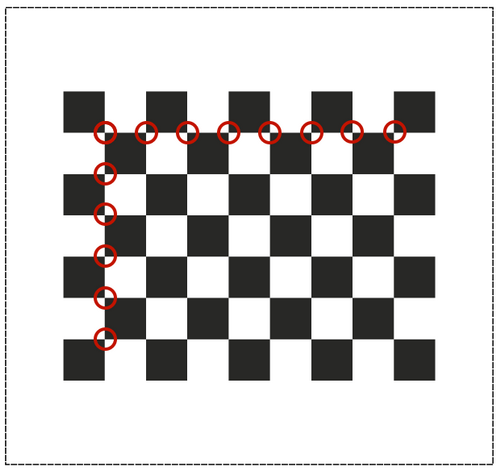
« rows »: 6,
« columns »: 8,
« origin_distance »: 35
}
}
square_size représente la longueur du côté d’un carré noir en millimètres.
rows et columns représentent les points de connexion des carrés noirs.
origin distance est la distance entre la surface de la plaque tournante et le bord supérieur des carrés noirs dans la rangée proche de la plaque tournante.
Une fois tous les paramètres (visiblement) corrects, on va pouvoir passer à l’utilisation du logiciel en lui-même.