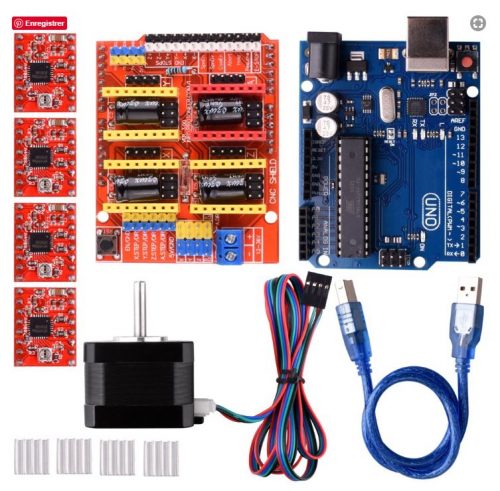
Le nombre de sites et forums divers qui présentent des solutions est impressionnant. Je ne donc rien inventer et partir sur la solution qui semble aujourd’hui la plus répandue et la plus économique : une solution à base d’une carte Arduino, d’un Shield CNC (je ne savais pas que cela existait) et de drivers adaptés aux moteurs Pas à Pas.
Petit tour rapide que Amazon, et je trouve exactement ce qu’il me fallait, avec en plus un moteur (cela tombe bien, il m’en manquait un), le tout pour moins de 30 € !!!
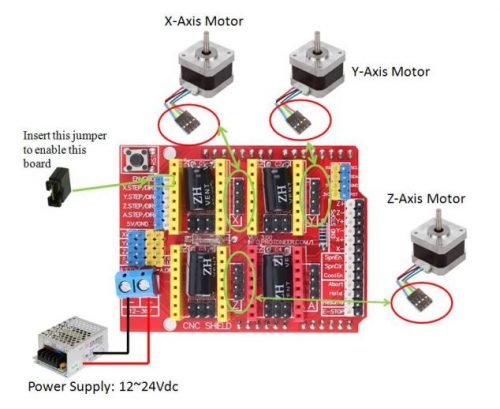
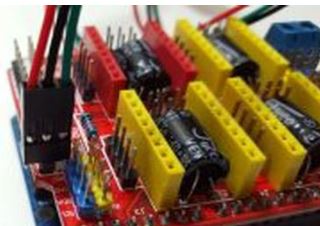
En pur respect de la philosophie Arduino, on réalise un empilage des différentes cartes pour obtenir une solution clé en main, avec un minimum de câblage : le câble USB vers le PC, une alimentation de puissance pour les moteurs, et un câble vers chaque moteur.
A noter que la carte dispose de 4 sorties moteur, la 4ème étant une replication de l’un des axes (non utilisé dans mon cas).
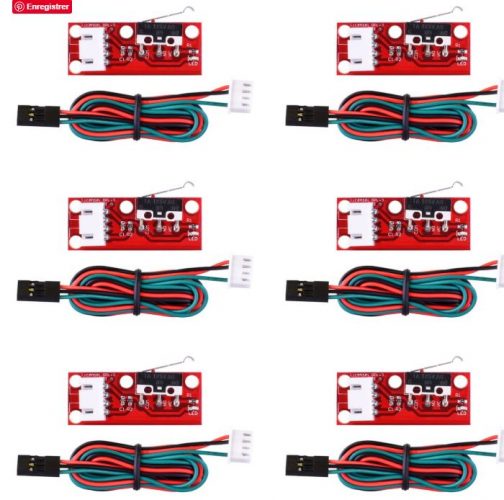
Cette carte permet aussi la connexion directe de 2 fin de course par axe. Là aussi, une solution est disponible sur Amazon, pour un coût minime (12 € les 6 capteurs).
Petite mise en garde
A priori, il y aura une chose à vérifier lors de la mise en service. Il serait nécessaire d’effectuer un réglage de courant/tension au niveau des cartes driver ?

Cette carte, lorsqu’elle est équipée d’un radiateur, est capable de délivrer un courant max de 2A. J’ai trouvé pas mal de sites traitant de la question, depuis un réglage fin au multimètre, jusqu’à un réglage empirique au bruit du moteur.
Pour ma part, j’ai retenu une seule chose : jeter un oeil à la fiche technique de mes moteurs afin de connaitre le courant consommé. Dans mon cas, il serait de 1,7A, donc inférieur au niveau max pouvant être fourni par la carte. Je suis donc serein sur les risques d’endommager l’électronique.
A vérifier à l’usage lors des premiers tests.
Configuration hardware
Avant de passer à l’aspect logiciel, il y a à minima quelques cavaliers à positionner sur la carte.
Pour chaque moteur, on peut préciser le Micro Stepping . Il s’agit ici de définir l’unité de déplacement à chaque impulsion. Chaque impulsion pourra correspondre par exemple à 1 pas, ou à 1/2 pas, etc (on ne parle pas ici de valeur de déplacement).
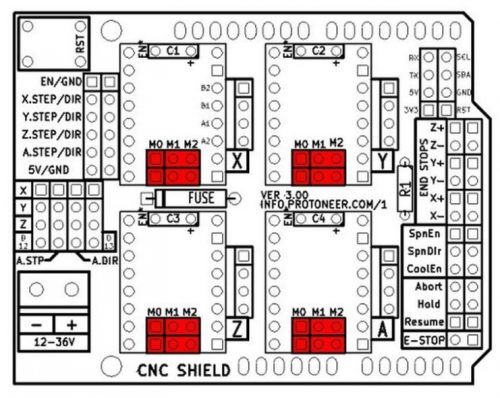
Ce paramétrage est réalisé à l’aide des cavaliers M0, M1 et M2 (sur une CNC Shield V3.x). Je choisis de mettre les 3 cavaliers en place, ce qui va correspondre à un Micro Steping de 1/16 de pas.
CÂBLAGE des capteurs de fin de course
Par défaut, la carte est configurée pour fonctionner avec des capteurs de fin de course « normalement ouvert », ce qui correspond bien à mon choix (cf ci-dessus).
Deux câblages sont possibles.
Le basique laisse le fil rouge du capteur non connecté.
Un câblage plus complet consiste à ramener le +5V sur le fil rouge, ce qui permet d’utiliser la visualisation présente sur la carte du capteur (petite Led rouge). Une façon de bien vérifier que le capteur fonctionne.
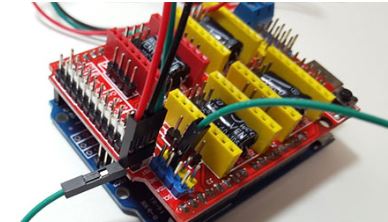
Câblage des moteurs
Rien de bien particulier. Bien penser à activer la carte (cavalier EN/GND)